
Lecture 0
Basics of Artifficial neural networks (NNs)
- primitive models – started in 50ties
- like if a drunk neuroscientist and a programmer chatted in a bar about their fields
- NNs are data hungry
- often other solution is way better (SVM, Dec. trees etc.)
Biological NN
- Humans have approx \(10^{11}\) neurons, \(10^4\) connections each
- Biological neurons are quiet until their electric potential is exceeded, then they “fire”
- Learning is believed to change the synaptic potential
Formal neuron
- \(x_1, ..., x_n \in \mathbb R\) are inputs
-
TODO:
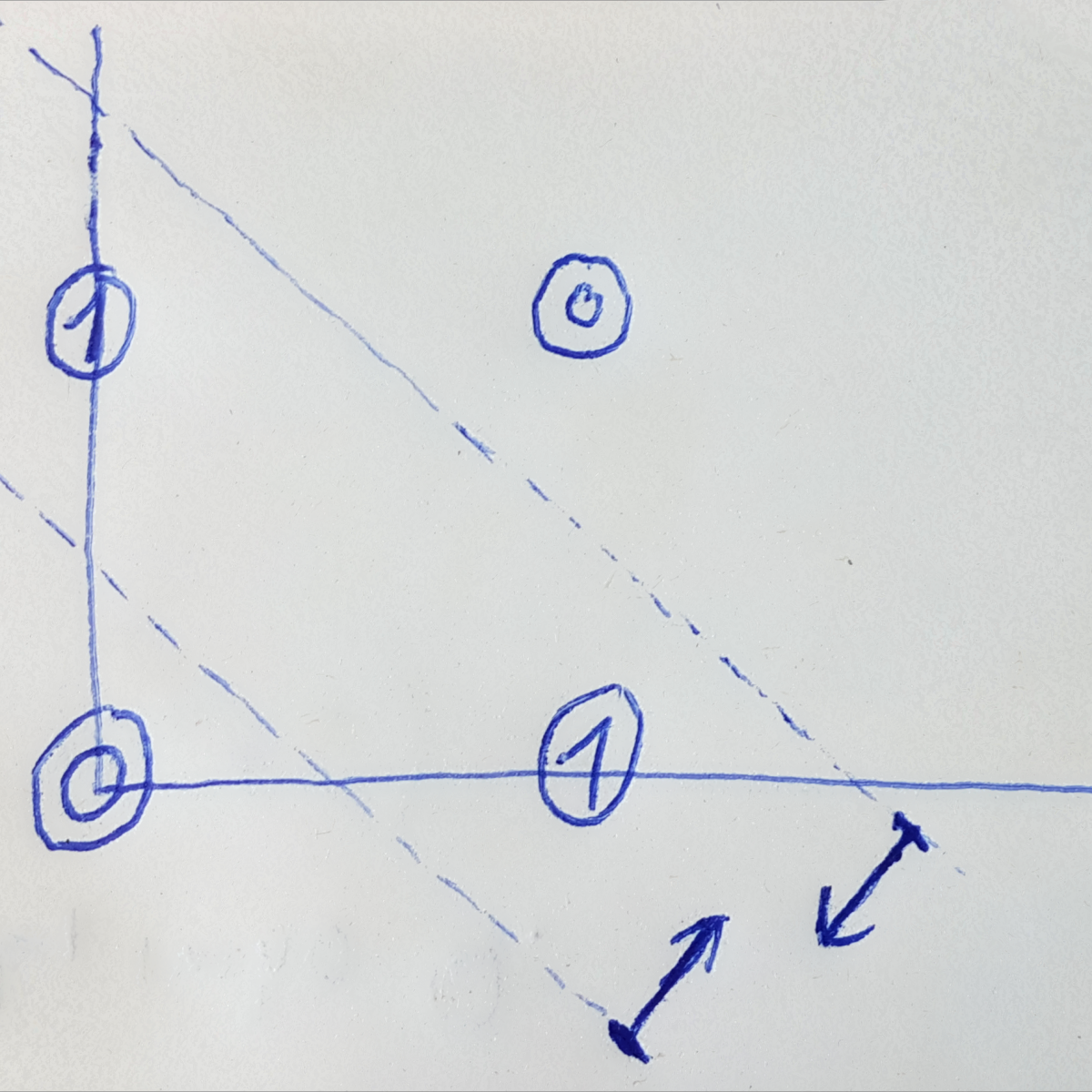
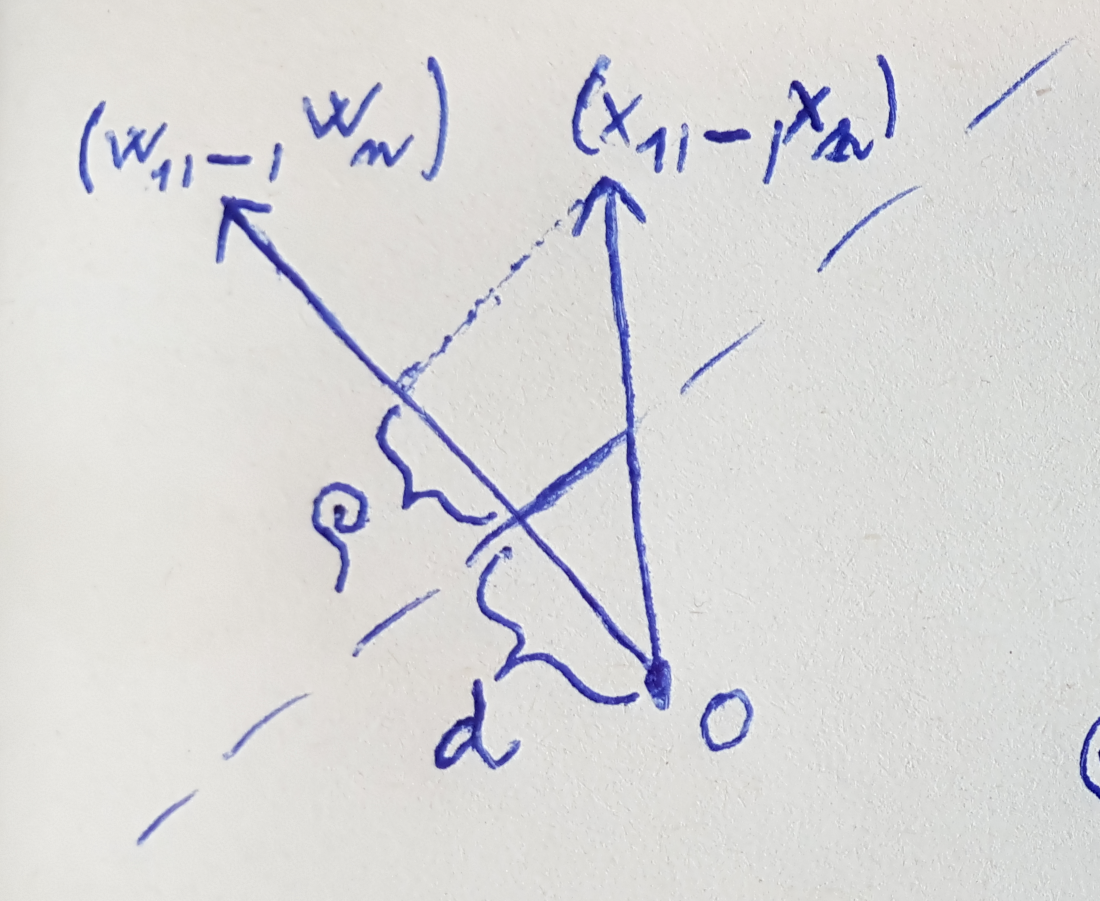
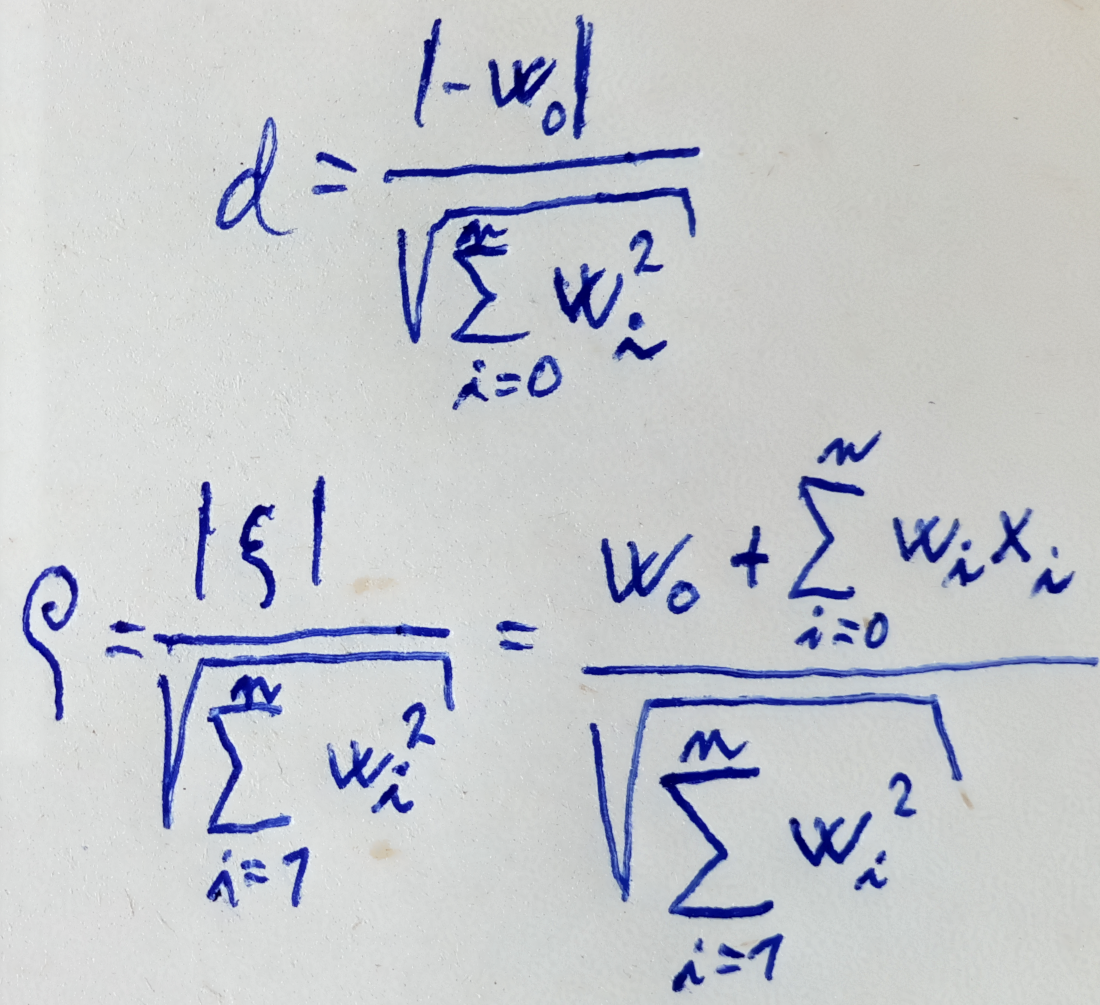
- Single neuron divides the hyperspace in “half” by a hyperplane
- The hyperplane is perpendicular to the weight vector
- Architecture – how the neurons are connected
- Activity – how the network transforms inputs to outputs
-
Learning – how the weights transform
- Architecture example
- Multilayer Perceptron (MLP)
- Neurons in layers
- Layers fully connected
- Multilayer Perceptron (MLP)
- Activity
- State – output values of a layer
- State-space – set of all states
- A computation is finite if there is finite number of steps
-
NN is a function: \(\mathbb R ^ n \rightarrow \mathbb R ^ m\)
- Activation functions
- Unit step function \(\sigma (\xi) = {1: \xi \geq 0; 0: \xi < 0}\)
- (Logistic) sigmoid \(\sigma (\xi) = \frac 1 {1 + e ^ {-\lambda \cdot \xi}} \text{ here } \lambda \in \mathbb R \text{ is the steepness}\)
- Hyperbolic tangens
- XOR with 2 layer
- Learning
- Configuration – vector of all values of weights
- Weight-space – set of all (possible) configurations
-
Initial configuration
- Supervised learning
- Unsupervised learning
- The goal is to determine distribution of the inputs by learning to reproduce -
FIX
Lecture 1
How strong are NN?
Boolean functions
- Any boolean function can be replicated by 2 layer NN
Any other function
- Split the area into convex areas
- Create tangents and “OR” them
or even stronger
- Split into grid of (really small) squares
- Any square is aproxitable with 4 neurons
- “OR” all squares
Theorem – Cybenko (1989)
- They are strong: TODO
NN and computability
- Recurrent NN with rational weights are at least as strong as Turing machines
- Recurrent NN with irational weights are super-Turing machines (can decide Turing machines)
| Neural networks | Classical computers | |
|---|---|---|
| Data | implicitly in weights | explicit |
| Computations | naturally parallel | sequential, localized* |
| Precision | imprecise | (typically) precise |
| Robustness | robust – 90+% can be deleted | fragile |
| TODO | ✔ | ✔ |
How to learn NN (software)
- Tensorflow (Google) – highly optimized
- Keras High level API
- Keras
- Theano – academic, clean, dead
Lecture 2
- \(E (w_0, ..., w_n) = \sum _ {i = 0}^n \frac {\delta} {w_i}\) TODO
- Why sigmoid as a loss function?
- let \(y\) be the probability of class A
- funciton of the odds: \(\frac {y} {1 - y}\)
- log it: \(\log \frac {y} {1 - y} = \vec w \cdot \vec x\)
- multiply by -1: \(\log \frac {1 - y} {y} = - \vec w \cdot \vec x\)
- move log: \(\frac {y} {1 - y} = e ^ {\vec w \cdot \vec x}\)
- stand alone \(y\): \(y = \frac 1 {1 + e ^ {\vec w \cdot \vec x}}\)
Lecture 3
MLP error fction gradient chain
- \[y_1 = o_1 (\xi _1 ); \xi _1 = w _{1, 2} \cdot y _2\]
- \[y_2 = o_2 (\xi _2 ); \xi _2 = w _{2, 3} \cdot y _3\]
-
…
- Error for k: \(E_k = \frac 1 2 (y _ 1 - d _ {k _ 1}) ^ 2\)
- Derivatives:
- \[\frac {\partial E_k} {\partial y _ 1} = y_1 - d_ {k _ 1}\]
- \[\frac {\partial E_k} {\partial y _ 2} = \frac {\partial E_k} {\partial y _ 1} \cdot \frac {\partial y _ 1} { \partial \xi _ 1} \cdot \frac {\partial \xi _ 1} {\partial w _ {2, 3}} = \frac {\partial E_k} {\partial y _ 1} \cdot \sigma ' _1 (\xi _ 1) \cdot y _ 2\]
- Generalized:
- \[\frac {\partial E _ k} {\partial w _ {j i}} = \frac {\partial E _ k} {\partial y _ j} \cdot \sigma ' _j (\xi _ j) \cdot y_i\]
- trivial for j in last layer: \(\frac {\partial E_k} {\partial y _ 1} = y_1 - d_ {k _ 1}\)
- otherwise: \(\frac {\partial E_k} {\partial y _ j} = \sum_{r \in \vec j} \frac {\partial E _ k} {\partial y _r} \cdot \sigma ' _r (\xi _ r) \cdot w _{rj}\)
- Derivations for different functions
- logistic sigmoid: \(\sigma _j (\xi) = \frac 1 {1 + e ^ {-\lambda_j \xi}}\)
- \[\sigma ' _j (\xi _ j) = \lambda _j y_j (1- y_j)\]
- tanh:
- logistic sigmoid: \(\sigma _j (\xi) = \frac 1 {1 + e ^ {-\lambda_j \xi}}\)
- Computation: (exactly in slides)
- Forward pass
- Backward pass
- Compute derivation for all weights
- the only place where we train the network using Gradient descent!
- The steps 1–3 are linear with respect to the size of the NN
- Basically turn the network upside down and exchange weights with \(\sigma_x ' (\xi_x) \cdot w_{xy}\)
Lecture 4
Practical issues of SGD
- Training variables
- Size of minibatch
- Learning rate (and it’s decrease)
- Pre-process of the inputs
- Weights initialization
- Output values
- Result quality check
- When to stop
- Regularization
- Metrics
Not to forget when solving our own MNIST task
- TODO?
How to process BIG data
- Use minibatch – wouldn’t be random
- Split into subsets with equal distribution
- Train on each subset
- Shuffle all data
- Repeat 1.
Random claims
- With higher dimension, different inicialization will get
- It’s easy to get stuck in a flat place, especially if using the Sigmoid function
- It’s typical to choose power of 2:
- The bigger, the better – theoretically
- The smaller the better (32 to 256) – empirically
Issues
Vanishing and exploding gradients
-
\[\frac {\partial E_k} {\partial y _j} = \sum _ {r \in j^ \rightarrow} \frac {\partial E_k} {\partial y _r} \cdot \sigma '_r (\xi _r) \cdot w_{rj}\]
- Every layer in the back propagation multiplies by a number under 1
- The “signal” going back is getting lower and lower =>
- We may truly train just the last few layers in a very big network
Moment
- Gradient descent ( \(\nabla E(w)\) TODO…) changes the direction with every step a lot
- Solution: In every step of G. descent add a part of the direction you were going from
Learning rate
- “The single most influential hyperparameter.”
TODO: Img from the presentation
- Use scheduler
- Lower the rate
- Use different optimizer
AdaGrad
- parameter-specific learning rates, which are adapted relative to how frequently a parameter gets updated during training.
-
The more updates a parameter receives, the smaller the updates.
- Problem: r get bigger and bigger
RMSprop
- Like AdaGrad, but forgets the past
Adam
- Like RMSprop, but with build-in momentum
Choice of (hidden) activations
- differenctiability
- for gradient descent
- non-linearility
- linear * linar = linear
- monotonicity
- do not add more local extrems
- “linearity”
- linear-like functions are easier (derivations, learning speed..)
Before training
Range not around 0
- Typical standardization:
- Average = 0 (subtract the mean)
- Variance = 1 (divide by the standard deviation)
Initial weights
- We want to have the standard
- Too small \(w\) we get (almost) linear model
-
Too large \(w\) we get to the saturated regions (binary?)
- \[o_j = \sqrt \frac d 3 \cdot w\]
- Therefore: \(w = (- \frac {\sqrt 3} {\sqrt d}, \frac {\sqrt 3} {\sqrt d})\)
- Where \(d\) is # of input weights
-
The forward pass is nice, but back propagation can Explode
- How does this interfere with Dropout?
Glorot & Belgio initialization (GLOROT)
- \[(- \sqrt \frac 6 {m + n}, \sqrt \frac 6 {m + n})\]
- Takes in count both sides of the neuron (m = # of inputs, n = # of outputs)
- Should work better even for back propagation
Output neurons
- Regression: linear or sigmoid
- Binary classification: tanh or sigmoid
- N classification: softmax
- Multiple classes: sigmoidal outputs and classes individually
Lecture 5
Generalization
- Data has, in general, some noise in it
- We don’t want to learn the noise
Overfitting
“With four parameters I can fit an elephant, with five I can make him wiggle his trunk.” – John Von Neumann
- What can we overfitt with GB of parameters?
Early stopping
- Split into
- Training set (train the network)
- Validation set (use to stop the training)
- Test set (evaluation)
- Never ever seen data (do not even look at them)
Sigmoidal & cross-entropy
- It’s (generaly) bad idea to use Sigmoidal + MSError
- The derivation is symetrical, so if you are completely wrong (or right), the error is small
- Cross-entropy solves this
- The error is big when the prediction is completely wrong and small only when you are almost right
Ensemble methods
- The idea: train several different models separately, then have all of the models vote on the output for test
Dropout
- Include the Ensemble method into one network
- Original implementation:
- In every step of SGD, every neuron is included with \($ \frac 1 2\)$ probability
- Modern: just randomly choose X % of the neurons of the layer
- Usually used without L2 norm
Weight decay and L2 regularization
- Push on the weights, make them prove themselves
-
In every step, decrease weights
- L1 norm – (probably) good for sparsity
- L2 norm – penalizes large weights, theoretically the same
- Usually used without Dropout
Convolutional layers
- Extracts features, read elsewhere
Pooling
- Max-pooling: max of inputs
- L2 … # TODO
Dataset expansion
- Move by \($x\)$ pixels to all directions
- Add noise
- Distort images (especially for Health data)
- => able to create 100 000 examples from only 1000
-
.
.
.